PINet Lightweight Lane Detection
Project Overview
PINet (Point Instance Network) is an end-to-end framework developed for accurate and lightweight lane detection. The network detects key points and clusters them to represent each traffic lane instance, providing a structured approach to lane recognition that is both computationally efficient and highly accurate.
Objectives
- Instance Segmentation: Use key points to differentiate lane instances.
- Efficiency and Lightweight: Minimize computational requirements without sacrificing accuracy.
- Real-Time Performance: Ensure quick lane detection suitable for autonomous driving applications.
Highlights
This project achieved:
- Enhanced accuracy in lane detection through a key-point clustering method, facilitating better traffic lane visualization.
- Real-time processing capability, making it adaptable for real-world applications.
- Low computational footprint, ideal for embedded systems in autonomous vehicles.
Visual Gallery
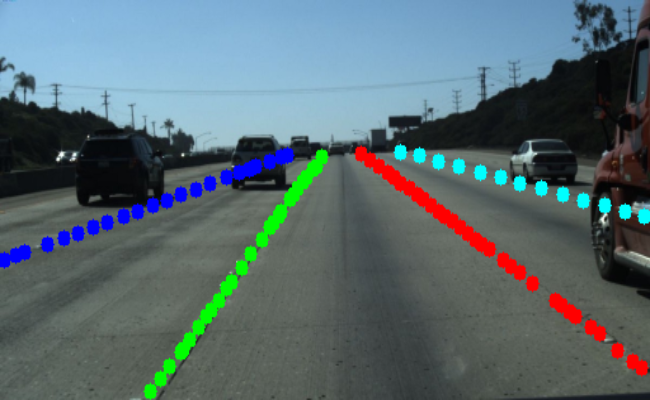
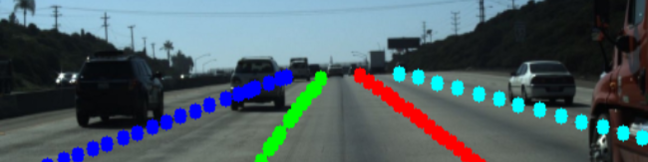
PINet Lane Detection
A practical example of lane detection using the PINet framework, highlighting accurate clustering of key points.
Additional Resources
For detailed code and documentation on PINet, visit the GitHub repository