Semantic Segmentation on Roads
Project Overview
The Semantic Segmentation on Roads project aimed to improve segmentation accuracy on road scenes by leveraging an encoder-decoder DNN structure. Various architectures, including GCN (Graph Convolutional Network), PSPNet (Pyramid Scene Parsing Network), and DUC-HDC (Dense Upsampling Convolution & Hybrid Dilated Convolution), were implemented and compared to assess their performance improvements on road scene datasets.
Objectives
- Enhanced Segmentation Accuracy: Apply and evaluate advanced segmentation models for detailed road scene analysis.
- Architecture Comparison: Examine the impact of GCN, PSPNet, and DUC-HDC on segmentation accuracy.
Highlights
Project achievements include:
- A comparative study revealing the strengths of each architecture in terms of segmentation detail, speed, and resource consumption.
- Enhanced accuracy in road lane and vehicle segmentation through DNN optimizations.
- Insights into architecture trade-offs, supporting further research in semantic segmentation.
Visual Insights
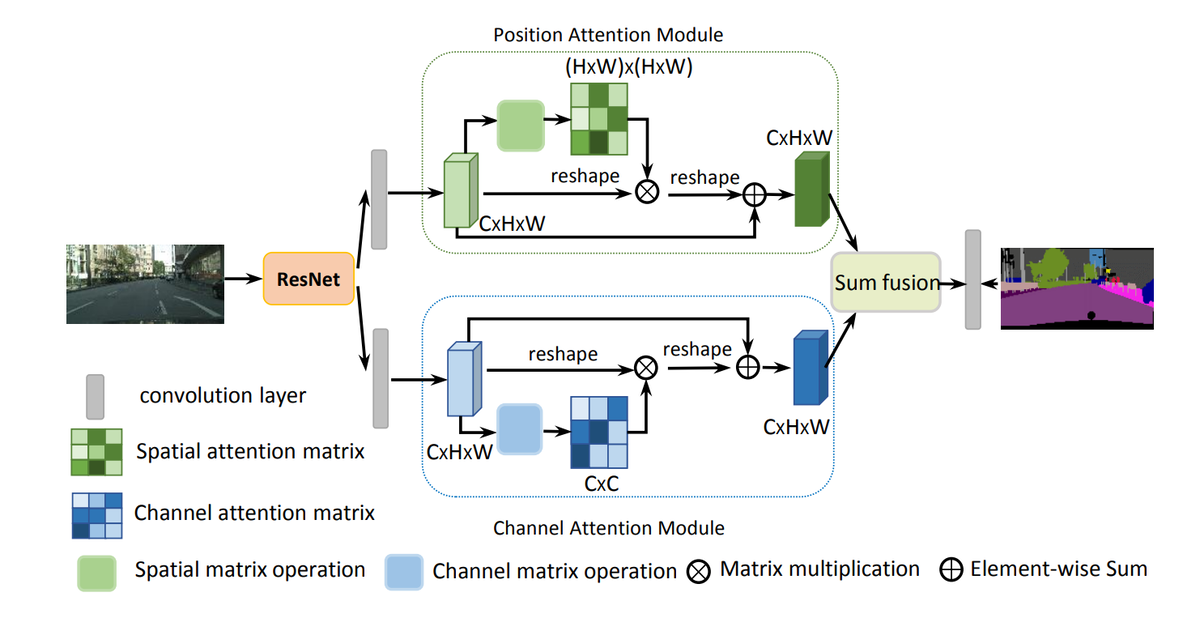
Road Scene Segmentation
Architecture used for accurate road scene analysis and segmentation.
Additional Resources
For more information, view the project’s GitHub repository